哈希 | Hash👀
约 1120 个字 120 行代码 预计阅读时间 5 分钟
Abstract
重点: 设计哈希函数 + 如何解决冲突
哈希表 | 散列表👀
- 哈希表把关键字 (或标识符 | identifier) 值映射到表中一个位置
- 支持查询、插入、删除等操作
-
对于标识符 \(x\) , 定义一个哈希函数 \(f(x) = x\) 在哈希表 ht[] 中的位置
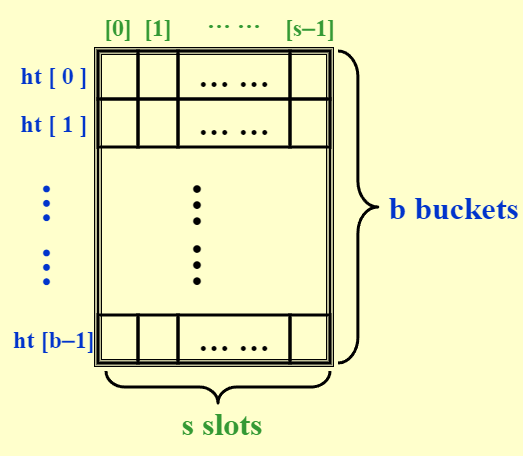
- 如图, ht 的大小为 \(b\)(即 \(f(x)\) 值域为 \([0, b-1]\)),最多有 s 个槽
- \(T\) = \(x\) 可能的不同值的个数
- \(n\) = ht 中不同标识符的个数
- 标识符密度 (identifier density) = \(n/T\)
- 装载密度 (loading density) = \(\lambda = n/(sb)\)
-
冲突 (collision) ——> 当将两个不同的标识符散列到同一个桶中时 (i.e. \(i_1 \neq i_2\) 但 \(f(i_1) = f(i_2)\) )
- 溢出(overflow): 当将一个新的标识符散列到一个满的桶时
当 s = 1 时,碰撞和溢出将同时发生
没有溢出时,\(T_{search} = T_{insert} = T_{delete} = O(1)\)
Example
哈希函数👀
Properties of f()
- 函数必须易于计算且尽量减少碰撞的可能性
- 函数应该是公正的 (unbiased),即对任意 \(x\) 和 \(i\) 都有 \(Probability(f(x) = i) = 1/b\) . 这种函数称为均匀哈希函数(uniform hash function)
几种函数构造方法:
-
除留余数法 —— \(f(x) = x ~~ \% ~~ TableSize;\)
/* if x is an integer*/- TableSize 最好选择一个质数 —— good for random integer keys
Example
关键字 内部代码 key MOD 100 key1 511 11 key2 512 12 key3 411 11 -
平方取中法 —— 先计算关键字值的平方,然后取平方值的中间几位作为散列地址
Example
关键字 内部代码 内部代码平方 hash(key) key1 511 261121 11 key2 512 262144 21 key3 411 168921 89 -
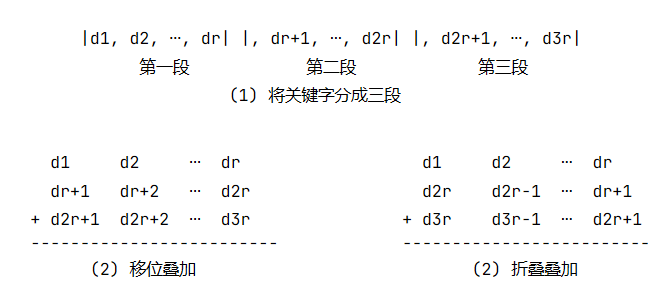
折叠法 —— 将关键字分为位数相同的几部分,然后取这几部分的叠加和(舍去进位)作为散列地址 (用于关键字位数较多,并且关键字中每一位上数字分布大致均匀)
Example
-
数字分析法 —— 当关键字的位数大于地址的位数,对关键字的各位分布进行分析,选出分布均匀的任意几位作为散列地址 (适用于所有关键字都已知的情况下,根据实际应用确定要选取的部分,尽量避免发生冲突)
Example
比如按学号映射,同届前几位相同,将后四位选为 key
-
\(f(x) = (\sum x[i]) ~~ \% ~~ TableSize;\)
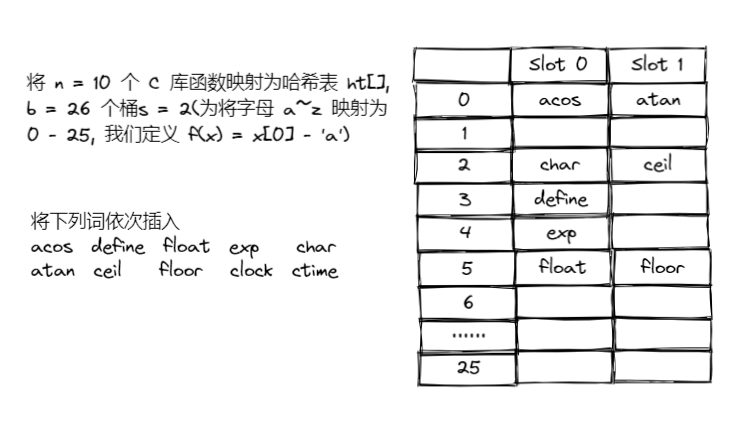
/* if x is a string*/Example
\(x = "abc" \Rightarrow \sum x[i] = 'a' + 'b' + 'c'\)
-
\(f(x) = (x[0] + x[1] * 27 + x[2] * 27^2 ) ~~ \% ~~ TableSize;\)
/* 变成 27 进制 */ -
\(f(x) = (\sum x[N-i-1] * 32^i) ~~ \% ~~ TableSize\)
/* *32 可以变为移位运算 */
解决冲突👀
分离链接 | Separate Chaining👀
- 将散列到相同值的元素保存在一个列表(链表)中
code
struct ListNode;
typedef struct ListNode *Position;
struct HashTbl;
typedef struct HashTbl *HashTable;
struct ListNode {
ElementType Element;
Position Next;
};
typedef Position List;
/* List *TheList will be an array of lists, allocated later */
/* The lists use headers (for simplicity), */
/* though this wastes space */
struct HashTbl {
int TableSize;
List *TheLists;
};
Create an empty table
HashTable InitializeTable( int TableSize )
{ HashTable H;
int i;
if ( TableSize < MinTableSize )
{
Error( "Table size too small" );
return NULL;
}
H = malloc( sizeof( struct HashTbl ) ); /* Allocate table */
if ( H == NULL )
FatalError( "Out of space!!!" );
H->TableSize = NextPrime( TableSize ); /* Better be prime */
H->TheLists = malloc( sizeof( List ) * H->TableSize ); /*Array of lists*/
if ( H->TheLists == NULL )
FatalError( "Out of space!!!" );
for( i = 0; i < H->TableSize; i++ )
{ /* Allocate list headers */
H->TheLists[ i ] = malloc( sizeof( struct ListNode ) ); /* Slow! */
if ( H->TheLists[ i ] == NULL )
FatalError( "Out of space!!!" );
else
H->TheLists[ i ]->Next = NULL;
}
return H;
}
Find a key from a hash table
Insert a key into a hash table
void Insert ( ElementType Key, HashTable H )
{
Position Pos, NewCell;
List L;
Pos = Find( Key, H );
if ( Pos == NULL )
{ /* Key is not found, then insert */
NewCell = malloc( sizeof( struct ListNode ) );
if ( NewCell == NULL )
FatalError( "Out of space!!!" );
else
{
L = H->TheLists[ Hash( Key, H->TableSize ) ];
NewCell->Next = L->Next;
NewCell->Element = Key; /* Probably need strcpy! */
L->Next = NewCell;
}
}
}
Tips: 将 TableSize 的大小设置为预期 keys 的数量几乎一样 (i.e. 使得装载密度 $\lambda \approx 1 $)
开放地址 | Open Adressing👀
- 当有冲突发生时,选择下一个位置,直到找到空的为止
- 即有多个哈希函数 \(h_0(x), h_1(x), \cdots\),其中 \(h_i(x) = (\mathrm{hash}(x)+f(i)) ~~ \% ~~ TableSize\)
- 其中 \(f(i)\) 为增量函数,有多种选取的方式
- 通常情况下 \(\lambda < 0.5\) , 如果大于 0.5 就会引发大量的冲突
void insert(int key) {
index = hash(key);
int i = 0; // the counter of probing
while (collision at index) {
index = (hash(key) + f(i)) % TableSize;
if (table is full)
break;
else
i++;
}
if (table is full)
Error("No space left");
else
insert key at index;
}
-
线性探测 | Linear Probing
- 增量函数 \(f(i) = i\) —— 会导致初次聚集(primary clustering),即一旦发生了冲突,那么后面的元素都会聚集在一起,搜索次数会变得越来越大
- 使用线性探测的探测次数对于插入和不成功查找来说约为\(\dfrac{1}{2}\left(1+\dfrac{1}{(1-\lambda)^2}\right)\)
- 对于成功的查找来说则需要 \(\dfrac{1}{2}\left(1+\dfrac{1}{1-\lambda}\right)\) 次
Example
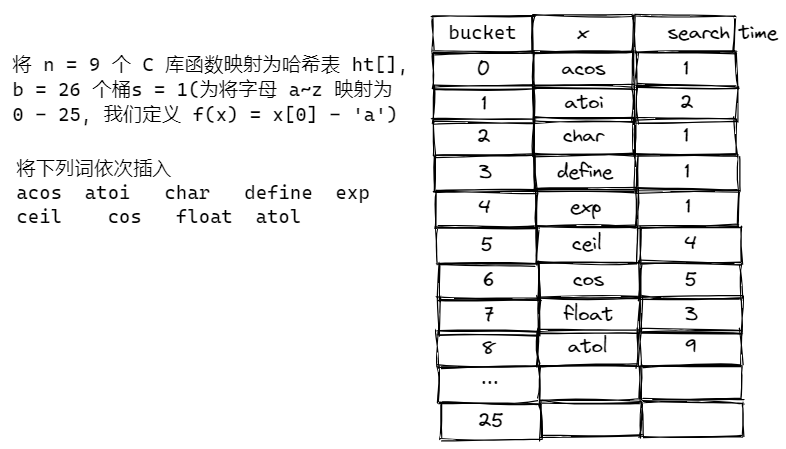
Average search time = 27 / 9 = 3 -
二次探测 | Quadratic Probing
- 增量函数 \(f(i) = i^2\) —— 避免了 primary clustering, 但是导致有可能有空位但就是找不到
-
若使用平方探测(或二次探测), 且表的大小是素数,那么当表至少有一半是空的时候,总能插入一个新的元素
一些改进: If the table size is a prime of the form \(4k + 3\) , then the quadratic probing \(f(i) = \pm ~~ i^2\) can probe the entire table.
Find
Position Find ( ElementType Key, HashTable H ) { Position CurrentPos; int CollisionNum; CollisionNum = 0; CurrentPos = Hash( Key, H->TableSize ); while( H->TheCells[ CurrentPos ].Info != Empty && H->TheCells[ CurrentPos ].Element != Key ) { CurrentPos += 2 * ++CollisionNum - 1; // h = h + 2i - 1 if ( CurrentPos >= H->TableSize ) CurrentPos -= H->TableSize; } return CurrentPos; }
- 双重哈希 | Double Hashing —— 即 \(f(i) = i \times hash_2(x)\);
/* hash2(x) 是第二个 hash 函数 */- 一般选择 \(hash_2(x) = R - (x ~~ \% ~~ R)\) (\(R\) 为小于表大小的质数) 效果更好
- 如果正确实现了双重哈希,模拟显示预期的探测次数几乎与随机冲突解决策略相同
- 二次探测不需要使用第二个哈希函数,在实践中更简单快速
- 再哈希:
- 使用二次探测,如果表的元素填的过满 (大约是装载密度 > 0.5 时),那么操作时间会过长,且 Insert 可能失败 ,这可能发生在有太多的移动和插入混合的场合
- 解决方法是再哈希:
- 建立另外一个大约两倍大的表且使用一个相关的新哈希函数
- 扫描整个原始哈希表
- 计算每个(未删除的)元素的新哈希值并将其插入到新表中
- 如果表中有 N 个元素,那再哈希的时间复杂度 \(T(N) = O(N)\)
- 什么时候再哈希
- 只要表有一半满
- 插入操作失败时
- 当表达到一个特定的装载密度