图 | Graph👀
约 2019 个字 591 行代码 预计阅读时间 14 分钟
Definitions👀
- Length of a path: 路径上边的数目
- Simple path: Path 中的点 vi1, vi2, ···, vin 都不同
- 无向图
- connected: 若存在一条从 vi 到 vj 的路径,则称 vi 和 vj 连通
- connected graph: 任意点之间都连通,称无向图是连通的
- connected component: 无向图的极大连通子图
- tree: 连通的无环图
- DAG: directed acyclic graph | 有向无环图
- Strongly connected component: 有向图的极大强连通子图
- Degree(v):
- 对有向图,度分为入度和出度
- 对无向图,度数是与其相邻的节点数
- 边数等于所有节点的度数和除以 2
图的表示👀
- 邻接矩阵 G[N][N] —— N 个顶点从 0 到 N-1 编号
- G[i][j] = < vi, vj > 是 G 中的边 ? 1 : 0
Tip
- 对于无向图的存储,用一个长度为 N(N+1)/2 的一维数组 A 存储 {G00, G10, G11, ···, G(n-1)0, ···, G(n-1)(n-1)}, 则 Gij 在 A 中对应的下标是: i * (i + 1) / 2 + j
- 对于网络,只要把 G[i][j] 的值定义为边 < vi, vj > 的权重即可
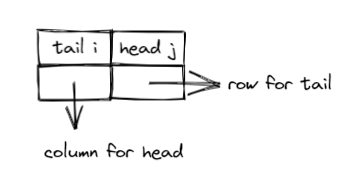
- 邻接表表示法 —— G[N] 为指针数组,对应矩阵每行要给链表且只存非 0 元素
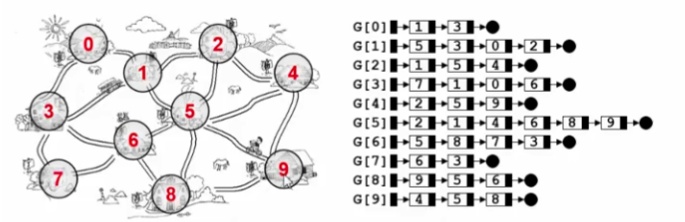
- 对于无向图,每个边会被存储两次
- 对于有向图,无法遍历入度,如果要查询入度可采用以下两种方法:
- 增加逆邻接表
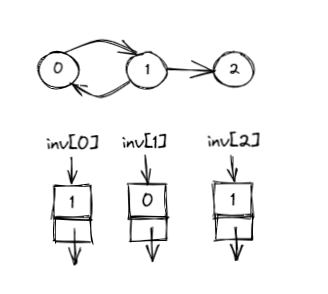
- 采用多重链表
- 增加逆邻接表
拓扑排序👀
Abstract
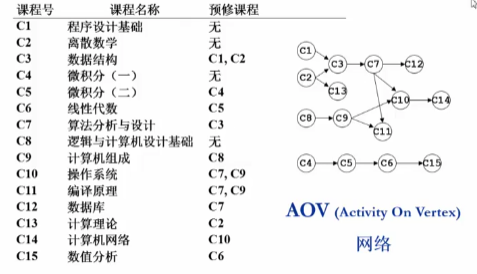
- AOV 网络 —— 定点表示活动,边表示先后关系
- 若存在一条从 i 到 j 的路径,则称 i 为 j 的前驱 (predecessor), j 是 i 的后继 (successor)
- 若存在一条边 < i, j >,则称 i 是 j 的直接前驱 (immediate predecessor) ,j 是 i 的直接后继
拓扑序👀
- 若在图中从 V 到 W 有一条有向路径,则 V 一定排在 W 之前。满足此条件的顶点序列称为一个拓扑序 (获得一个拓扑序的过程就是拓扑排序)
- AOV 如果有合理的拓扑序,则必定是有向无环图 (Directed Acyclic Graph, DAG)
如果有向图中出现环,一定不可能得到一个合理的拓扑序
拓扑排序算法👀
void Topsort(Graph G)
{
int Counter;
Vertex V, W;
for(Counter = 0; Counter < NumVertex; Counter ++)
{
V = FindNeVertexOfDegreeZero(); /* O(|V|) */
if(V == NotAVertex)
{
Error("Graph has a cycle");
break;
}
TopNum[V] = Counter; /*or output V*/
for(each W adjacent to V)
Indegree[W] --;
}
}
- 上述算法的时间复杂度 $T = O(|V|^2) $
- Improvement: 随时将入度变为 0 的顶点放到一个容器中(栈或队列等)
void Topsort( Graph G )
{
Queue Q;
int Counter = 0;
Vertex V, W;
Q = CreateQueue( NumVertex );
MakeEmpty( Q );
for ( each vertex V )
if ( Indegree[ V ] == 0 )
Enqueue( V, Q );
while ( !IsEmpty( Q ) )
{
V = Dequeue( Q );
TopNum[ V ] = ++ Counter; /* assign next */
for ( each W adjacent to V )
if ( – – Indegree[ W ] == 0 )
Enqueue( W, Q );
} /* end-while */
if ( Counter != NumVertex )
Error( “Graph has a cycle” );
DisposeQueue( Q ); /* free memory */}
若有环则一定会存在找不到入度为 0 的点,来进入构成环的子图
邻接表存储—拓扑排序算法
bool TopSort( LGraph Graph, Vertex TopOrder[] )
{ /* 对Graph进行拓扑排序, TopOrder[]顺序存储排序后的顶点下标 */
int Indegree[MaxVertexNum], cnt;
Vertex V;
PtrToAdjVNode W;
Queue Q = CreateQueue( Graph->Nv );
/* 初始化Indegree[] */
for (V=0; V<Graph->Nv; V++)
Indegree[V] = 0;
/* 遍历图,得到Indegree[] */
for (V=0; V<Graph->Nv; V++)
for (W=Graph->G[V].FirstEdge; W; W=W->Next)
Indegree[W->AdjV] ++; /* 对有向边<V, W->AdjV>累计终点的入度 */
/* 将所有入度为0的顶点入列 */
for (V=0; V<Graph->Nv; V++)
if ( Indegree[V]==0 )
AddQ(Q, V);
/* 下面进入拓扑排序 */
cnt = 0;
while( !IsEmpty(Q) ){
V = DeleteQ(Q); /* 弹出一个入度为 0 的顶点 */
TopOrder[cnt ++] = V; /* 将之存为结果序列的下一个元素 */
/* 对V的每个邻接点W->AdjV */
for ( W=Graph->G[V].FirstEdge; W; W=W->Next )
if ( --Indegree[W->AdjV] == 0 )/* 若删除V使得W->AdjV入度为0 */
AddQ(Q, W->AdjV); /* 则该顶点入列 */
} /* while结束*/
if ( cnt != Graph->Nv )
return false; /* 说明图中有回路, 返回不成功标志 */
else
return true;
}
最短路算法👀
最短路径问题的抽象
在网络中,求两个不同顶点之间的所有路径中,边的权值之和最小的那一条路径。这条路径即两点之间的最短路径 (Shortest Path) , 第一个顶点为源点 (Source) , 最后一个顶点为终点 (Destination)
问题分类👀
- 单源最短路径: 从固定源点出发,求其到所有其他顶点的最短路径
- (有向) 无权图
- (有向) 有权图
- 多源最短路径: 求任意两顶点间的最短路径
无权图的单源最短路👀
按照递增 (递减) 的顺序找出到各顶点的最短路
采用 BFS (Breadth-first search)
Implementation
- Normal:
void Unweighted( Table T ) { int CurrDist; Vertex V, W; for ( CurrDist = 0; CurrDist < NumVertex; CurrDist ++ ) { for ( each vertex V ) if ( !T[ V ].Known && T[ V ].Dist == CurrDist ) { T[ V ].Known = true; for ( each W adjacent to V ) if ( T[ W ].Dist == Infinity ) { T[ W ].Dist = CurrDist + 1; T[ W ].Path = V; } /* end-if Dist == Infinity */ } /* end-if !Known && Dist == CurrDist */ } /* end-for CurrDist */ }\(T = O(|V|^2)\)
- Improvement:
void Unweighted( Table T ) { /* T is initialized with the source vertex S given */ Queue Q; Vertex V, W; Q = CreateQueue (NumVertex ); MakeEmpty( Q ); Enqueue( S, Q ); /* Enqueue the source vertex */ while ( !IsEmpty( Q ) ) { V = Dequeue( Q ); T[ V ].Known = true; /* not really necessary */ for ( each W adjacent to V ) if ( T[ W ].Dist == Infinity ) { T[ W ].Dist = T[ V ].Dist + 1; T[ W ].Path = V; Enqueue( W, Q ); } /* end-if Dist == Infinity */ } /* end-while */ DisposeQueue( Q ); /* free memory */ }\(T = O(|V|+|E|)\)
邻接表存储 - 无权图的单源最短路算法
/* dist[]和path[]全部初始化为-1 */
void Unweighted ( LGraph Graph, int dist[], int path[], Vertex S )
{
Queue Q;
Vertex V;
PtrToAdjVNode W;
Q = CreateQueue( Graph->Nv ); /* 创建空队列, MaxSize为外部定义的常数 */
dist[S] = 0; /* 初始化源点 */
AddQ (Q, S);
while( !IsEmpty(Q) ){
V = DeleteQ(Q);
for ( W=Graph->G[V].FirstEdge; W; W=W->Next ) /* 对V的每个邻接点W->AdjV */
if ( dist[W->AdjV]==-1 ) { /* 若W->AdjV未被访问过 */
dist[W->AdjV] = dist[V]+1; /* W->AdjV到S的距离更新 */
path[W->AdjV] = V; /* 将V记录在S到W->AdjV的路径上 */
AddQ(Q, W->AdjV);
}
} /* while结束*/
}
有权图的单源最短路👀
按照递增的顺序找出到各顶点的最短路
Dijkstra 算法👀
- 令 S = {源点 s + 已经确定了最短路径的顶点 vi }
- 对任一未收录的顶点 v, 定义 dist[v] 为 s 到 v 的最短路径长度,但该路径仅经过 s 中的顶点。
- 由于路径按照递增顺序生成
- 真正的最短路必须只经过 S 中的顶点
- 每次从未收录的顶点中选一个 dist 最小的收录
- 增加一个 v 进入 S,可能影响另一个 w 的 dist 值(dist[w] = min{dist[w], dist[v] + < v, w > 的权重})
code
void Dijkstra(Table T)
{
Vertex V, W;
for(;;) /* O(|V|) */
{
V = smallest unknown distance vertex;
if(V == NotAVertex)
break;
T[V].Known = true;
for(each W adjacent to V)
if(!T[W].Known)
if(T[V].Dist + Cvw < T[W].Dist)
{
Decrease(T[W].Dist to T[V].Dist + Cvw);
T[W].Path = V;
}/* end-if update W */
}/* end-for(;;) */
}
/* 不能解决有负边的情况 */
Dijkstra算法的声明
表初始化例程
- 因为判定条件 T[V].Dist + Cvw < T[W].Dist,T[i].Dist 要初始化为正无穷
- 优化如下:
- Implementation 1: 直接扫描所有未收录顶点 —— \(O(|V|)\)
- \(T = O(|V|^2 + |E|)\) —— 对于稠密图效果好
- Implementation 2: 将 dist 存在最小堆中 —— \(O(log|V|)\)
- 更新 T[W].Dist 的值 —— \(O(log|V|)\)
- $ T = O(|V|log|V| + |E|log|V|) = O(|E|log|V|) $ —— 对稀疏图效果好(指 V 和 E 一个数量级)
- Implementation 1: 直接扫描所有未收录顶点 —— \(O(|V|)\)
邻接矩阵存储 - 有权图的单源最短路算法
Vertex FindMinDist( MGraph Graph, int dist[], int collected[] )
{
/* 返回未被收录顶点中dist最小者 */
Vertex MinV, V;
int MinDist = INFINITY;
for (V=0; V<Graph->Nv; V++)
{
if ( collected[V]==false && dist[V]<MinDist)
{
/* 若V未被收录,且dist[V]更小 */
MinDist = dist[V]; /* 更新最小距离 */
MinV = V; /* 更新对应顶点 */
}
}
if (MinDist < INFINITY) /* 若找到最小dist */
return MinV; /* 返回对应的顶点下标 */
else
return ERROR; /* 若这样的顶点不存在,返回错误标记 */
}
bool Dijkstra( MGraph Graph, int dist[], int path[], Vertex S )
{
int collected[MaxVertexNum];
Vertex V, W;
/* 初始化:此处默认邻接矩阵中不存在的边用 INFINITY 表示 */
for ( V=0; V<Graph->Nv; V++ ) {
dist[V] = Graph->G[S][V];
if ( dist[V] < INFINITY )
path[V] = S;
else
path[V] = -1;
collected[V] = false;
}
/* 先将起点收入集合 */
dist[S] = 0;
collected[S] = true;
while (1) {
/* V = 未被收录顶点中 dist 最小者 */
V = FindMinDist( Graph, dist, collected );
if ( V == ERROR ) /* 若这样的V不存在 */
break; /* 算法结束 */
collected[V] = true; /* 收录V */
for( W=0; W<Graph->Nv; W++ ) /* 对图中的每个顶点W */
/* 若W是V的邻接点并且未被收录 */
if ( collected[W]==false && Graph->G[V][W]<INFINITY )
{
if ( Graph->G[V][W]<0 ) /* 若有负边 */
return false; /* 不能正确解决,返回错误标记 */
/* 若收录V使得dist[W]变小 */
if ( dist[V]+Graph->G[V][W] < dist[W] ) {
dist[W] = dist[V]+Graph->G[V][W]; /* 更新dist[W] */
path[W] = V; /* 更新S到W的路径 */
}
}
} /* while结束*/
return true; /* 算法执行完毕,返回正确标记 */
}
带负权图👀
时间复杂度 \(T = O(|V| \times |E|)\)
void WeightedNegative( Table T )
{
Queue Q;
Vertex V, W;
Q = CreateQueue (NumVertex );
MakeEmpty( Q );
Enqueue( S, Q ); /* Enqueue the source vertex */
while ( !IsEmpty( Q ) )
{
V = Dequeue( Q ); /* each vertex can dequeue at most |V| times */
for ( each W adjacent to V )
if ( T[ V ].Dist + Cvw < T[ W ].Dist ) /* no longer once per edge */
{
T[ W ].Dist = T[ V ].Dist + Cvw;
T[ W ].Path = V;
if ( W is not already in Q )
Enqueue( W, Q );
} /* end-if update */
} /* end-while */
DisposeQueue( Q ); /* free memory */
}
/* negative-cost cycle will cause indefinite loop */
无环图 | Acyclic Graph👀
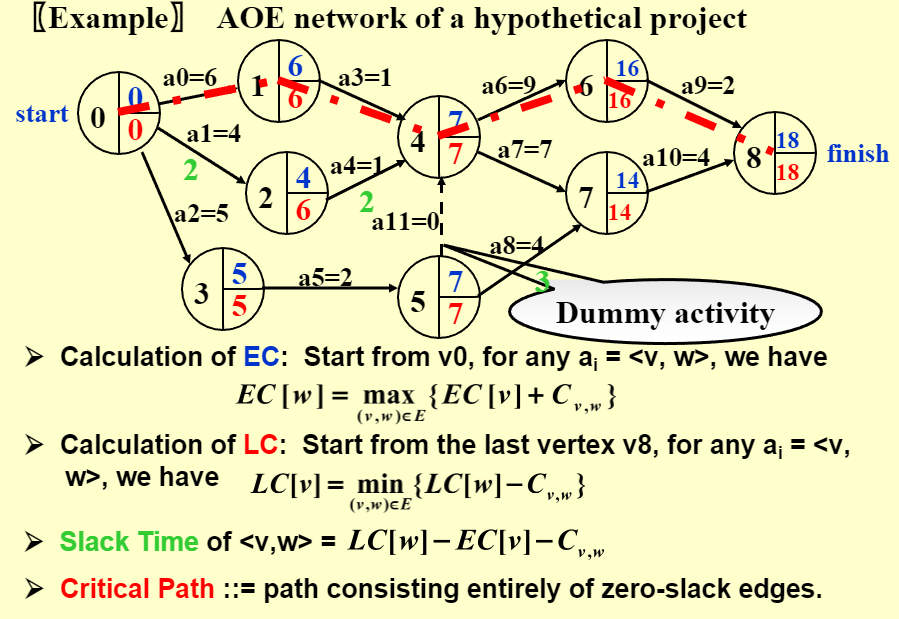
此部分主要是其在 AOE (Activity On Edge) 网络的应用
一般用于安排项目的工序
- 每个结点存储一个最早完成时间和最晚完成时间
- 每条边存在一个持续时间 (边权 C ) 和一个松弛时间
- 相关计算:
- EC (earliest completion): 最早完成时间,从前往后计算
- LC (latest completion): 最晚完成时间,用需要最长的时间从后向前依次减去
- Slack Time: 松弛时间 | 机动时间,最早完成的时间和要求的最晚完成的时间之间的时间
- Critical Path: 关键路径,可能不止一条但找出一条路径上所有点都是关键点(松弛时间为 0)的就行
拓展
多源最短路
算法——(直接将单源最短路算法调用 |V| 遍 or Floyd 算法)
void Floyd()
{
for( i = 0; i < N; i++)
{
for( j = 0; j < N; j++)
{
D[i][j] = G[i][j];
path[i][j] = -1;
/*path用于记录路径*/
}
}
for( k = 0; k < N; k++)
{
for( i = 0; i < N; i++)
{
for( j = 0; j < N; j++)
{
if( D[i][k] + D[k][j] < D[i][j])
{
D[i][j] = D[i][k] + D[k][j];
path[i][j] = k;
/*如果将i到j的最短路径*/
}
}
}
}
}
最小生成树 | Minimum Spanning Tree👀
- 是一棵树,且:
- 无回路
- 连通的
- |V|个顶点一定有|V| -1条边
- 是生成树
- 包含全部顶点
- |V| -1条边都在图中
- 边的权重和最小
向生成树中任加一条边都一定构成回路
最小生成树存在 \(\Leftrightarrow\) 图连通
Prim 算法👀
稠密图一般用此算法,每次寻找的是和已经收罗进最小生成树所有顶点相邻的边
类似 Dijkstra 算法, \(T = O( |V| ^2 )\)
code
/* 邻接矩阵存储 - Prim最小生成树算法 */
Vertex FindMinDist( MGraph Graph, WeightType dist[] )
{ /* 返回未被收录顶点中dist最小者 */
Vertex MinV, V;
WeightType MinDist = INFINITY;
for (V=0; V<Graph->Nv; V++)
{
if ( dist[V]!=0 && dist[V]<MinDist)
{
/* 若V未被收录,且dist[V]更小 */
MinDist = dist[V]; /* 更新最小距离 */
MinV = V; /* 更新对应顶点 */
}
}
if (MinDist < INFINITY) /* 若找到最小dist */
return MinV; /* 返回对应的顶点下标 */
else
return ERROR; /* 若这样的顶点不存在,返回-1作为标记 */
}
int Prim( MGraph Graph, LGraph MST )
{
/* 将最小生成树保存为邻接表存储的图 MST,返回最小权重和 */
WeightType dist[MaxVertexNum], TotalWeight;
Vertex parent[MaxVertexNum], V, W;
int VCount;
Edge E;
/* 初始化。默认初始点下标是0 */
for (V=0; V<Graph->Nv; V++) {
/* 这里假设若V到W没有直接的边,则Graph->G[V][W]定义为INFINITY */
dist[V] = Graph->G[0][V];
parent[V] = 0; /* 暂且定义所有顶点的父结点都是初始点0 */
}
TotalWeight = 0; /* 初始化权重和 */
VCount = 0; /* 初始化收录的顶点数 */
/* 创建包含所有顶点但没有边的图。注意用邻接表版本 */
MST = CreateGraph(Graph->Nv);
E = (Edge)malloc( sizeof(struct ENode) ); /* 建立空的边结点 */
/* 将初始点0收录进MST */
dist[0] = 0;
VCount ++;
parent[0] = -1; /* 当前树根是0 */
while (1) {
V = FindMinDist( Graph, dist );
/* V = 未被收录顶点中dist最小者 */
if ( V==ERROR ) /* 若这样的V不存在 */
break; /* 算法结束 */
/* 将V及相应的边<parent[V], V>收录进MST */
E->V1 = parent[V];
E->V2 = V;
E->Weight = dist[V];
InsertEdge( MST, E );
TotalWeight += dist[V];
dist[V] = 0;
VCount++;
for( W=0; W<Graph->Nv; W++ ) /* 对图中的每个顶点W */
if ( dist[W]!=0 && Graph->G[V][W]<INFINITY ) {
/* 若W是V的邻接点并且未被收录 */
if ( Graph->G[V][W] < dist[W] ) {
/* 若收录V使得dist[W]变小 */
dist[W] = Graph->G[V][W]; /* 更新dist[W] */
parent[W] = V; /* 更新树 */
}
}
} /* while结束*/
if ( VCount < Graph->Nv ) /* MST中收的顶点不到|V|个 */
TotalWeight = ERROR;
return TotalWeight; /* 算法执行完毕,返回最小权重和或错误标记 */
}
Kruskal 算法👀
将每个顶点都看作一棵树,收集的是边,如果这条边收入构成回路就不收入,如果不构成就收入(从边权重最小开始收,收到边的数量为|V|-1为止)
- 稀疏图一般用此算法(边的数量和顶点数量级差不多)
- \(T = O(|E|log|E|)\)
void Kruskal ( Graph G )
{
T = { } ;
while ( T contains less than |V| 1 edges && E is not empty )
{
choose a least cost edge (v, w) from E ; /* DeleteMin */
delete (v, w) from E ;
if ( (v, w) does not create a cycle in T )
add (v, w) to T ; /* Union / Find */
else
discard (v, w) ;
}
if( T contains fewer than |V| - 1 edges )
Error ( “No spanning tree” ) ;}
code
/* 邻接表存储 - Kruskal最小生成树算法 */
/*-------------------- 顶点并查集定义 --------------------*/
typedef Vertex ElementType; /* 默认元素可以用非负整数表示 */
typedef Vertex SetName; /* 默认用根结点的下标作为集合名称 */
typedef ElementType SetType[MaxVertexNum]; /* 假设集合元素下标从0开始 */
void InitializeVSet( SetType S, int N )
{ /* 初始化并查集 */
ElementType X;
for ( X=0; X<N; X++ ) S[X] = -1;
}
void Union( SetType S, SetName Root1, SetName Root2 )
{ /* 这里默认Root1和Root2是不同集合的根结点 */
/* 保证小集合并入大集合 */
if ( S[Root2] < S[Root1] ) { /* 如果集合2比较大 */
S[Root2] += S[Root1]; /* 集合1并入集合2 */
S[Root1] = Root2;
}
else { /* 如果集合1比较大 */
S[Root1] += S[Root2]; /* 集合2并入集合1 */
S[Root2] = Root1;
}
}
SetName Find( SetType S, ElementType X )
{ /* 默认集合元素全部初始化为-1 */
if ( S[X] < 0 ) /* 找到集合的根 */
return X;
else
return S[X] = Find( S, S[X] ); /* 路径压缩 */
}
bool CheckCycle( SetType VSet, Vertex V1, Vertex V2 )
{ /* 检查连接V1和V2的边是否在现有的最小生成树子集中构成回路 */
Vertex Root1, Root2;
Root1 = Find( VSet, V1 ); /* 得到V1所属的连通集名称 */
Root2 = Find( VSet, V2 ); /* 得到V2所属的连通集名称 */
if( Root1==Root2 ) /* 若V1和V2已经连通,则该边不能要 */
return false;
else { /* 否则该边可以被收集,同时将V1和V2并入同一连通集 */
Union( VSet, Root1, Root2 );
return true;
}
}
/*-------------------- 并查集定义结束 --------------------*/
/*-------------------- 边的最小堆定义 --------------------*/
void PercDown( Edge ESet, int p, int N )
{ /* 改编代码4.24的PercDown( MaxHeap H, int p ) */
/* 将N个元素的边数组中以ESet[p]为根的子堆调整为关于Weight的最小堆 */
int Parent, Child;
struct ENode X;
X = ESet[p]; /* 取出根结点存放的值 */
for( Parent=p; (Parent*2+1)<N; Parent=Child ) {
Child = Parent * 2 + 1;
if( (Child!=N-1) && (ESet[Child].Weight>ESet[Child+1].Weight) )
Child++; /* Child指向左右子结点的较小者 */
if( X.Weight <= ESet[Child].Weight ) break; /* 找到了合适位置 */
else /* 下滤X */
ESet[Parent] = ESet[Child];
}
ESet[Parent] = X;
}
void InitializeESet( LGraph Graph, Edge ESet )
{ /* 将图的边存入数组ESet,并且初始化为最小堆 */
Vertex V;
PtrToAdjVNode W;
int ECount;
/* 将图的边存入数组ESet */
ECount = 0;
for ( V=0; V<Graph->Nv; V++ )
for ( W=Graph->G[V].FirstEdge; W; W=W->Next )
if ( V < W->AdjV ) { /* 避免重复录入无向图的边,只收V1<V2的边 */
ESet[ECount].V1 = V;
ESet[ECount].V2 = W->AdjV;
ESet[ECount++].Weight = W->Weight;
}
/* 初始化为最小堆 */
for ( ECount=Graph->Ne/2; ECount>=0; ECount-- )
PercDown( ESet, ECount, Graph->Ne );
}
int GetEdge( Edge ESet, int CurrentSize )
{ /* 给定当前堆的大小CurrentSize,将当前最小边位置弹出并调整堆 */
/* 将最小边与当前堆的最后一个位置的边交换 */
Swap( &ESet[0], &ESet[CurrentSize-1]);
/* 将剩下的边继续调整成最小堆 */
PercDown( ESet, 0, CurrentSize-1 );
return CurrentSize-1; /* 返回最小边所在位置 */
}
/*-------------------- 最小堆定义结束 --------------------*/
int Kruskal( LGraph Graph, LGraph MST )
{ /* 将最小生成树保存为邻接表存储的图MST,返回最小权重和 */
WeightType TotalWeight;
int ECount, NextEdge;
SetType VSet; /* 顶点数组 */
Edge ESet; /* 边数组 */
InitializeVSet( VSet, Graph->Nv ); /* 初始化顶点并查集 */
ESet = (Edge)malloc( sizeof(struct ENode)*Graph->Ne );
InitializeESet( Graph, ESet ); /* 初始化边的最小堆 */
/* 创建包含所有顶点但没有边的图。注意用邻接表版本 */
MST = CreateGraph(Graph->Nv);
TotalWeight = 0; /* 初始化权重和 */
ECount = 0; /* 初始化收录的边数 */
NextEdge = Graph->Ne; /* 原始边集的规模 */
while ( ECount < Graph->Nv-1 ) { /* 当收集的边不足以构成树时 */
NextEdge = GetEdge( ESet, NextEdge ); /* 从边集中得到最小边的位置 */
if (NextEdge < 0) /* 边集已空 */
break;
/* 如果该边的加入不构成回路,即两端结点不属于同一连通集 */
if ( CheckCycle( VSet, ESet[NextEdge].V1, ESet[NextEdge].V2 )==true ) {
/* 将该边插入MST */
InsertEdge( MST, ESet+NextEdge );
TotalWeight += ESet[NextEdge].Weight; /* 累计权重 */
ECount++; /* 生成树中边数加1 */
}
}
if ( ECount < Graph->Nv-1 )
TotalWeight = -1; /* 设置错误标记,表示生成树不存在 */
return TotalWeight;
}
深度优先搜索 | DFS👀
void DFS ( Vertex V ) /* this is only a template */
{
visited[ V ] = true; /* mark this vertex to avoid cycles */
for ( each W adjacent to V )
if ( !visited[ W ] )
DFS( W );
} /* T = O( |E| + |V| ) as long as adjacency lists are used */
是先序遍历的一种推广
双连通 | Binconnectivity👀
- 若一个图不是双连通的,那么将其删除后图不再连通的顶点叫做割点 (articulation point)
- 若一个连通的无向图中的任一顶点删除后,剩下的图仍然连通 (即连通且无割点) ,则称其为双连通
- 双连通分量 (biconnected component) 是极大的双连通子图
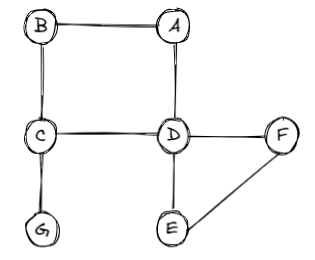
具有割点 C 和 D 的图
-
Tarjan算法
对顶点的 Num 赋值例程
/* Assign Num and compute Parents */ void AssignNum(Vertex V) { Vertex W; Num[V] = Counter ++; Visited[V] = True; for each W adjacent to V if(!Visited[W]) { Parent[W] = V; AssignNum(W); } }通过 DFS 建立的最小生成树
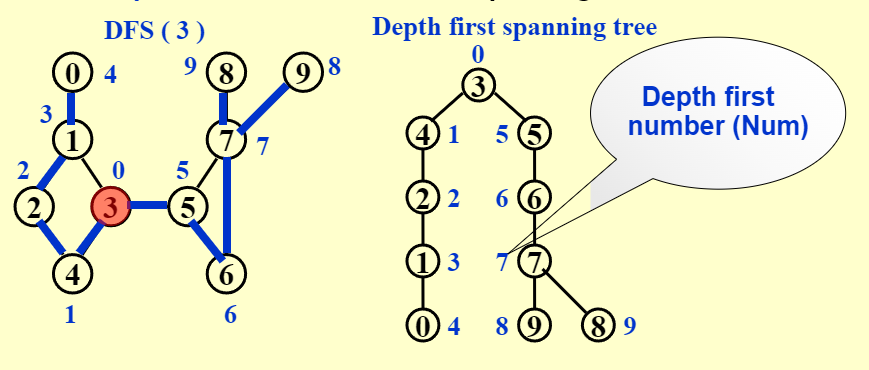
back edge: ( \(u, v\) ) \(\notin\) tree and \(u\) (or \(v\) ) is an ancestor of \(v\) (or \(u\) )
Note: If \(u\) is an ancestor of \(v\) , then Num( \(u\) ) < Num( \(v\) )- Num[v] 表示 v 第一次被访问的时间戳,即 DFS 时第几个被访问(从0开始)
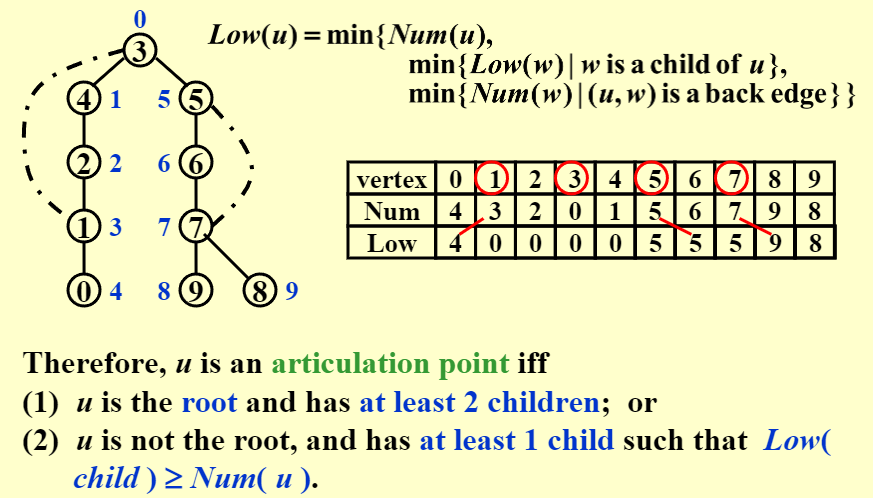
- 追溯值 low[x]
- 对于图中从 x 到 y 的边 :
- 如果 < x, y > 在树上,则 low[x] = min(Num[x], low[y])
- 如果 < x, y > 不在树上,则 low[x] = min(Num[x], Num[y])
- 寻找割点:
- 如果 u 是 root,则 u 是割点当且仅当 u 有至少两个儿子
- 如果 u 不是 root,则 u 是割点当且仅当存在一个儿子 v,满足 Num[u] \(\leq\) low[v]
- 计算 Low 并检验是否割点 (忽略对根的检验)
/* Assign Low; also check for articulation points */ void AssignLow(Vertex V) { Vertex W; Low[V] = Num[V]; /* Rule 1 */ for each W adjacent to V { if(Num[W] > Num[V]) /* Forward edge */ { AssignLow(W); if(Low[W] >= Num[V]) printf("%v is an articulation point\n", v); Low[V] = Min(Low[V], Low[W]); } else if(Parent[V] != W) /* Back edge */ Low[V] = Min(Low[V], Num[W]); /* Rule 2 */ } } - 在一次 DFS 中对割点的检测 (忽略对根的检测)
void FindArt(Vertex V) { Vertex W; Visited[V] = True; Low[V] = Num[V] = Counter ++; for(each W adjacent to V) { if(!Visited[W]) { Parent[W] = V; FindArt(W); if(Low[W] >= Num[V]) { printf("%v is an articulation point\n", v); } Low[V] = Min(Low[V], Low[W]); } else if(Parent[V] != W) { Low[V] = Min(Low[V], Num[W]); } } }
欧拉回路 & 欧拉路径👀
- 欧拉路径 (Euler path | Euler tour) —— 一笔画 | 包含所有边的简单路径
- 如果正好有两个度为奇数的顶点,欧拉路径就是可能的。必须从一个奇度的顶点开始 “画”
- 欧拉回路 (Euler circuit) —— 一笔画并且结束点和起始点重合 | 包含所有边的简单环
- 只有当图连通且每个顶点度为偶数,欧拉回路才有可能
- 对无向图
- 欧拉回路的判定: 图连通且所有顶点的度为偶数
- 欧拉路径的判定: 图连通且有且仅有两个顶点的度数是奇数
- 有向图
- 欧拉回路的判定: 弱连通且所有顶点的出度等于入度
- 欧拉路径的判定: 弱连通且有且仅有一个顶点的出度比入度大 1 及一个顶点的入度比出度大 1,其余顶点的出度等于入度
弱连通 —— 将有向图的所有有向边替换为无向边得到的图是连通
- DFS 遍历整张图即可求得路径